




Glisonasspiralinės kūginės pavarosyra specializuotas kūginės pavaros tipas, skirtas perduoti galią tarp susikertančių velenų, paprastai 90 laipsnių kampu. „Gleason“ sistemą išskiria unikali dantų geometrija ir gamybos metodas, užtikrinantis sklandų judėjimą, didelį sukimo momentą ir tylų veikimą. Šios pavaros plačiai naudojamos automobilių, pramonės ir aviacijos transmisijose, kur patikimumas ir tikslumas yra labai svarbūs.
Glisono sistema buvo sukurta siekiant patobulinti tiesius irnulinės kampinės pavarosįvedant išlenktą, spiralinės formos dantį. Ši spiralinė forma leidžia palaipsniui suktis tarp dantų, žymiai sumažinant triukšmą ir vibraciją, tuo pačiu užtikrinant didesnį sukimosi greitį ir apkrovą. Ši konstrukcija taip pat pagerina sąlyčio santykį ir paviršiaus stiprumą, užtikrindama efektyvų galios perdavimą esant didelėms ar dinaminėms apkrovoms.
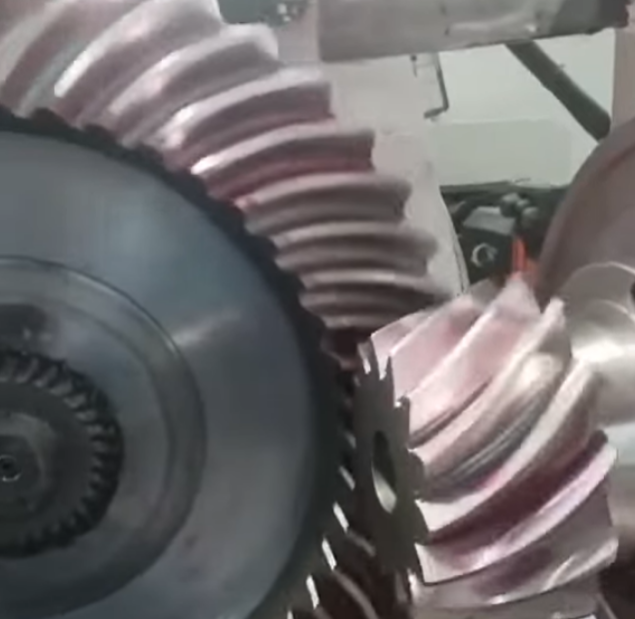
Kiekvieną „Gleason“ spiralinės kūginės pavaros porą sudaro krumpliaratis ir priešpriešinis krumpliaratis, pagaminti naudojant suderintą geometriją. Gamybos procesas yra labai specializuotas. Jis prasideda nuo legiruotojo plieno ruošinių, tokių kaip 18CrNiMo7-6, kalimo arba tikslaus liejimo, po kurio atliekamas grubus pjovimas, frezavimas arba formavimas, siekiant sukurti pradinę krumpliaračio formą. Pažangūs metodai, tokie kaip 5 ašių apdirbimas, šlifavimas ir kietasis pjovimas, užtikrina didelį matmenų tikslumą ir optimizuotą paviršiaus apdailą. Po terminio apdorojimo, pvz., įanglinimo (58–60 HRC), krumpliaračiai yra šlifuojami arba poliruojami, kad būtų pasiektas idealus krumpliaračio ir krumpliaračio sujungimas.
Gleasono spiralinių kūginių krumpliaračių geometriją apibrėžia keli svarbūs parametrai – spiralės kampas, slėgio kampas, žingsnio kūgio atstumas ir paviršiaus plotis. Šie parametrai yra tiksliai apskaičiuojami siekiant užtikrinti teisingus dantų sąlyčio modelius ir apkrovos paskirstymą. Galutinio patikrinimo metu tokie įrankiai kaip koordinačių matavimo mašina (CMM) ir dantų sąlyčio analizė (TCA) patikrina, ar krumpliaračių komplektas atitinka reikiamą DIN 6 arba ISO 1328-1 tikslumo klasę.

Veikianti Glisono spiralėkūginės pavarosPasižymi dideliu efektyvumu ir stabilumu net ir sudėtingomis sąlygomis. Išlenkti dantys užtikrina nuolatinį kontaktą, sumažindami įtempių koncentraciją ir dilimą. Dėl to jie idealiai tinka automobilių diferencialams, sunkvežimių pavarų dėžėms, sunkiosioms mašinoms, laivų varymo sistemoms ir elektriniams įrankiams. Be to, galimybė pritaikyti dantų geometriją ir tvirtinimo atstumą leidžia inžinieriams optimizuoti konstrukciją pagal konkretų sukimo momentą, greitį ir erdvės apribojimus.
Gleasono tipo spiralinės kampinės pavaros raktų skaičiavimo lentelė
| Prekė | Formulė / išraiška | Kintamieji / Pastabos |
|---|---|---|
| Įvesties parametrai | (z_1, z_2, m_n, alfa_n, Sigma, b, T) | Krumpliaračio/krumpliaračio dantys (z); normalus modulis (m_n); normalus slėgio kampas (\alpha_n); veleno kampas (\Sigma); paviršiaus plotis (b); perduodamas sukimo momentas (T). |
| Atskaitos (vidutinis) skersmuo | (d_i = z_i , m_n) | i = 1 (krumpliaratis), 2 (krumpliaratis). Vidutinis/etaloninis skersmuo normaliame pjūvyje. |
| Piko (kūgio) kampai | (\delta_1,\ \delta_2) taip, kad (\delta_1 + \delta_2 = \Sigma) ir (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | Išspręskite kūgio kampus, atitinkančius dantų proporcijas ir veleno kampą. |
| Kūgio atstumas (žingsnio viršūnės atstumas) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | Atstumas nuo kūgio viršūnės iki dvitaškio apskritimo, matuojamas išilgai generatoriaus. |
| Apskritimo žingsnis (normalus) | (p_n = \pi m_n) | Linijinis žingsnis normalioje sekcijoje. |
| Skersinis modulis (apytiksliai) | (m_t = ∫frac{m_n}{cosbeta_n}) | (\beta_n) = normalusis spiralės kampas; prireikus transformuoja tarp normalaus ir skersinio pjūvio. |
| Spiralinis kampas (vidurinis/skersinis santykis) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = vidutinis kūgio kampas; naudokite transformacijas tarp statmenojo, skersinio ir vidutinio spiralinio kampo. |
| Veido pločio rekomendacija | (b = k_b , m_n) | (k_b) paprastai parenkamas nuo 8 iki 20, priklausomai nuo dydžio ir taikymo; tikslią vertę galite sužinoti iš projektavimo praktikos. |
| Papildymas (vidurkis) | (apytiksliai m_n) | Standartinis viso gylio papildymo aproksimavimas; tikslioms vertėms gauti naudokite tikslių dantų proporcijų lenteles. |
| Išorinis (antgalio) skersmuo | (d_{o,i} = d_i + 2a) | i = 1,2 |
| Šaknies skersmuo | (d_{f,i} = d_i – 2h_f) | (h_f) = dedendumas (iš krumpliaračių sistemos proporcijų). |
| Apvalaus danties storis (apytiksliai) | (s maždaug ∫frac{\pi m_n}{2}) | Kūgio geometrijai tikslumui naudokite pakoreguotą storį iš dantų lentelių. |
| Tangentinė jėga ties žingsnio apskritimu | (F_t = ∫frac{2T}{d_p}) | (T) = sukimo momentas; (d_p) = žingsnio skersmuo (naudokite nuoseklius matavimo vienetus). |
| Lenkimo įtempis (supaprastintas) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = perkrovos koeficientas, (K_V) = dinaminis koeficientas, (Y) = formos koeficientas (lenkimo geometrija). Projektavimui naudokite visą AGMA/ISO lenkimo lygtį. |
| Kontaktinis įtempis (Hertzo tipo, supaprastintas) | (\sigma_H = C_H ∫qrt{\dfrac{F_t}{d_p , b} ∫cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1} + \frac{1-\nu_2^2}{E_2}}}) | (C_H) geometrijos konstanta, (E_i,\nu_i) medžiagos tamprumo moduliai ir Puasono santykiai. Patvirtinimui naudokite pilnas sąlyčio ir įtempio lygtis. |
| Kontaktų santykis (bendras) | (\varepsilon = \dfrac{\text{veiksmo lankas}}{\text{bazinis žingsnis}}) | Kūginių krumpliaračių atveju skaičiuokite naudodami žingsnio kūgio geometriją ir spiralės kampą; paprastai įvertinkite naudodami krumpliaračių projektavimo lenteles arba programinę įrangą. |
| Virtualus dantų skaičius | (z_v ∫apytiksliai ∫frac{d}{m_t}) | Naudinga kontaktiniams/įpjovimo patikrinimams; (m_t) = skersinis modulis. |
| Minimalūs dantys / įpjovimo patikrinimas | Naudokite minimalią dantų būklę, pagrįstą spiralės kampu, slėgio kampu ir dantų proporcijomis | Jei (z) yra mažesnis už minimalų, reikalingas įpjovimas arba specialus įrankis. |
| Mašinos / pjaustytuvo nustatymai (projektavimo žingsnis) | Nustatykite pjovimo galvutės kampus, lopšio sukimąsi ir indeksavimą pagal krumpliaračio sistemos geometriją | Šie nustatymai pagrįsti krumpliaračio geometrija ir pjovimo sistema; laikykitės staklių / įrankių naudojimo procedūros. |
Šiuolaikinės gamybos technologijos, tokios kaip CNC kūginių krumpliaračių pjovimo ir šlifavimo staklės, užtikrina pastovią kokybę ir pakeičiamumą. Integruodami kompiuterinį projektavimą (CAD) ir modeliavimą, gamintojai gali atlikti atvirkštinę inžineriją ir virtualius bandymus prieš faktinę gamybą. Tai sumažina gamybos laiką ir sąnaudas, tuo pačiu pagerinant tikslumą ir patikimumą.

Apibendrinant galima teigti, kad „Gleason“ spiralinės kūginės pavaros yra puikus pažangios geometrijos, medžiagos tvirtumo ir gamybos tikslumo derinys. Dėl jų gebėjimo užtikrinti sklandų, efektyvų ir patvarų galios perdavimą jos tapo nepakeičiamu šiuolaikinių pavaros sistemų komponentu. Nesvarbu, ar jos naudojamos automobilių, pramonės, ar aviacijos ir kosmoso sektoriuose, šios pavaros ir toliau užtikrina puikų judėjimą ir mechanines charakteristikas.
Įrašo laikas: 2025 m. spalio 24 d.