




Planetinė pavara, kaip transmisijos mechanizmas, plačiai naudojama įvairiose inžinerijos praktikose, tokiose kaip reduktoriai, kranai, planetiniai reduktoriai ir kt. Planetinė pavara daugeliu atvejų gali pakeisti fiksuotos ašies krumpliaračių perdavimo mechanizmą. Kadangi krumpliaračių perdavimo procesas yra linijinis kontaktas, ilgalaikis sujungimas sukels krumpliaračio gedimą, todėl būtina imituoti jos stiprumą. Li Hongli ir kt. naudojo automatinį sujungimo metodą planetinei pavarai sujungti ir gavo, kad sukimo momentas ir didžiausias įtempis yra tiesiniai. Wang Yanjun ir kt. taip pat sujungė planetinę pavarą automatinio generavimo metodu ir imitavo planetinės pavaros statinę ir modalinę simuliaciją. Šiame straipsnyje tinkleliui padalyti daugiausia naudojami tetraedriniai ir heksaedriniai elementai, o galutiniai rezultatai analizuojami siekiant nustatyti, ar tenkinamos stiprumo sąlygos.
1. Modelio sukūrimas ir rezultatų analizė
Trimatis planetinės pavaros modeliavimas
Planetinė pavaradaugiausia sudaryta iš žiedinės pavaros, saulės pavaros ir planetinės pavaros. Pagrindiniai šiame straipsnyje pasirinkti parametrai yra šie: vidinio krumpliaračio žiedo dantų skaičius yra 66, saulės pavaros dantų skaičius yra 36, planetinės pavaros dantų skaičius yra 15, vidinio krumpliaračio žiedo išorinis skersmuo yra 150 mm, modulis yra 2 mm, slėgio kampas yra 20 °, dantų plotis yra 20 mm, pridėtinio aukščio koeficientas yra 1, laisvumo koeficientas yra 0,25 ir yra trys planetinės pavaros.
Planetinės pavaros statinio modeliavimo analizė
Apibrėžkite medžiagos savybes: importuokite UG programine įranga nubraižytą trimatę planetinę pavarų sistemą į ANSYS ir nustatykite medžiagos parametrus, kaip parodyta 1 lentelėje:

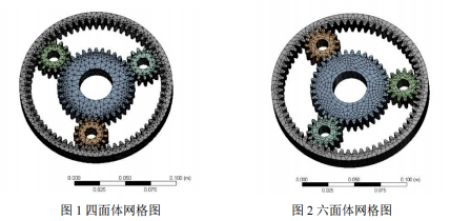
Tinklelis: Baigtinių elementų tinklelis yra padalintas iš tetraedro ir heksaedro, o pagrindinis elemento dydis yra 5 mm. Kadangiplanetinė pavara, saulės krumpliaratis ir vidinis krumpliaračio žiedas liečiasi ir yra sujungti, kontaktinių ir tinklelio dalių tinklelis yra sutankintas, o dydis yra 2 mm. Pirmiausia naudojami tetraedriniai tinkleliai, kaip parodyta 1 paveiksle. Iš viso generuojami 105906 elementai ir 177893 mazgai. Tada naudojamas šešiakampis tinklelis, kaip parodyta 2 paveiksle, ir iš viso generuojami 26957 langeliai ir 140560 mazgų.
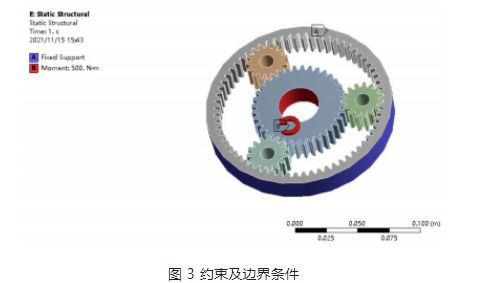
Apkrovos taikymas ir ribinės sąlygos: atsižvelgiant į planetinės pavaros reduktoriuje darbo charakteristikas, saulės krumpliaratis yra varančioji pavara, planetinė pavara yra varomoji pavara, o galutinė išvestis yra per planetinį laikiklį. Pritvirtinkite vidinį krumpliaračio žiedą ANSYS sistemoje ir saulės krumpliaračiui pritaikykite 500 N · m sukimo momentą, kaip parodyta 3 paveiksle.
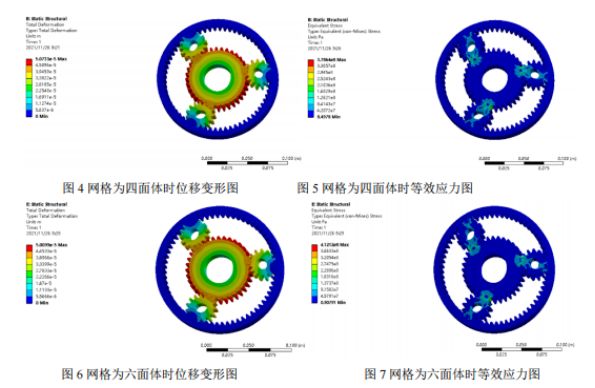
Tolesnis apdorojimas ir rezultatų analizė: Žemiau pateikiamos iš dviejų tinklelio padalijimų gautos statinės analizės poslinkio nefograma ir ekvivalentinio įtempio nefograma, ir atliekama lyginamoji analizė. Iš dviejų tinklelio tipų poslinkio nefogramos nustatyta, kad didžiausias poslinkis atsiranda toje vietoje, kur žvaigždinė krumpliaratis nesikerta su planetine krumpliaračiu, o didžiausias įtempis atsiranda krumpliaračio tinklelio šaknyje. Didžiausias tetraedrinio tinklelio įtempis yra 378 MPa, o didžiausias šešiakampio tinklelio įtempis – 412 MPa. Kadangi medžiagos takumo riba yra 785 MPa, o saugos koeficientas yra 1,5, leistinas įtempis yra 523 MPa. Abiejų rezultatų didžiausias įtempis yra mažesnis už leistiną įtempį ir abu atitinka stiprumo sąlygas.
2. Išvada
Planetinės pavaros baigtinių elementų modeliavimo būdu gaunama pavarų sistemos poslinkio deformacijos nefograma ir lygiavertė įtempių nefograma, iš kurių nustatomi didžiausi ir mažiausi duomenys bei jų pasiskirstymasplanetinė pavaragalima rasti modelį. Didžiausio ekvivalentinio įtempio vieta taip pat yra ta vieta, kurioje krumpliaračių dantys greičiausiai suges, todėl į tai reikia atkreipti ypatingą dėmesį projektuojant ar gaminant. Išanalizavus visą planetinės pavaros sistemą, įveikiama paklaida, atsirandanti analizuojant tik vieną krumpliaračio dantį.
Įrašo laikas: 2022 m. gruodžio 28 d.